ML with QC - Ch2
'Machine Learning with Quantum Computers' 2장 정리
 Quantum Science and Technology
Quantum Science and Technology이 포스트는 Maria Schuld와 Francesco Petruccione의 저서 “Machine Learning with Quantum Computers” (2nd Edition)의 Chapter 2. Machine Learning 내용을 요약한 것입니다.
1. 개요 (Introduction)
2장에서는 양자 머신러닝을 이해하기 위한 기초로서 머신러닝의 전반적인 개념을 다룹니다. 학습 문제의 유형, 학습의 필수 요소, 그리고 다양한 머신러닝 기법들을 소개합니다.
2. 목차 (Contents)
이 장은 다음과 같은 주요 섹션으로 구성됩니다:
- 머신러닝 문제의 예 (Examples of Typical Machine Learning Problems): 다양한 문제 유형 이해.
- 학습 문제의 3요소 (The Three Ingredients of a Learning Problem): 프로세스(Process), 데이터(Data), 모델(Model), 손실(Loss).
- 지도 학습의 위험 최소화 (Risk Minimization in Supervised Learning): 비용 함수와 최적화.
- 비지도 학습의 훈련 (Training in Unsupervised Learning): 최대 우도 추정(MLE).
- 머신러닝 기법들 (Methods in Machine Learning): 선형 모델, 신경망, 그래피컬 모델, 커널 방법.
3. 머신러닝 문제의 예
머신러닝 분야는 데이터의 특성과 학습 목표에 따라 크게 분류할 수 있습니다. 대표적인 문제 유형과 실제 예시를 살펴봅니다:
- 이미지 분류 (Image Classification): 고양이 사진인지 개 사진인지 구분하기. 픽셀 값(입력 $X$)을 받아 레이블(출력 $Y$)을 예측합니다. → 지도 학습
- 스팸 필터링 (Spam Detection): 이메일 텍스트를 보고 스팸인지 아닌지 판별합니다. 레이블된 훈련 데이터가 필요합니다. → 지도 학습 (분류)
- 주가 예측 (Stock Price Prediction): 과거 주가 데이터를 이용해 미래 주가를 예측합니다. → 지도 학습 (회귀)
- 고객 세분화 (Customer Segmentation): 레이블 없이 고객들의 구매 패턴을 분석해 유사한 그룹으로 묶습니다. → 비지도 학습 (군집 분석)
- 의료 진단 보조: 환자의 증상 데이터에서 질병 패턴을 찾습니다. 레이블이 있으면 지도 학습, 없으면 비지도 학습.
- 게임 AI (AlphaGo 등): 규칙은 알지만 최적 전략은 시행착오를 통해 스스로 학습합니다. → 강화 학습
핵심: 같은 데이터라도 목표와 레이블 여부에 따라 사용하는 학습 방식이 달라집니다.
4. 머신러닝의 종류
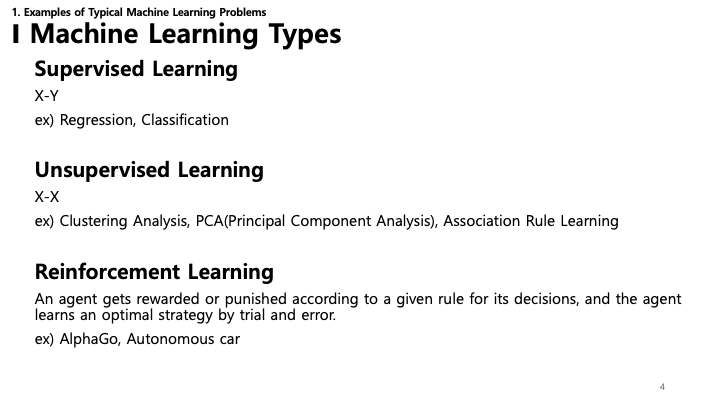
- 지도 학습 (Supervised Learning, X-Y): 레이블이 지정된 데이터(입력 X, 출력 Y)로부터 학습합니다. (예: 회귀, 분류)
- 비지도 학습 (Unsupervised Learning, X-X): 레이블이 없는 데이터에서 패턴을 찾습니다. (예: 군집 분석, 주성분 분석(PCA), 연관 규칙 학습)
- 강화 학습 (Reinforcement Learning): 에이전트가 시행착오를 통해 보상이나 처벌을 받으며 최적의 전략을 학습합니다. (예: 알파고, 자율주행차)
5. 학습 문제의 3요소
모든 머신러닝 문제는 다음의 핵심 요소들로 설명할 수 있습니다:
- 프로세스 (Process): 데이터를 생성하는 과정 또는 모델링하려는 현상.
- 데이터 (Data): 프로세스로부터 수집된 관측값.
- 모델 (Model): 프로세스를 근사하기 위해 사용하는 수학적 구조.
- 손실 (Loss): 모델이 데이터를 얼마나 잘 예측하거나 적합하는지 측정하는 함수.
6. 프로세스 (Process)
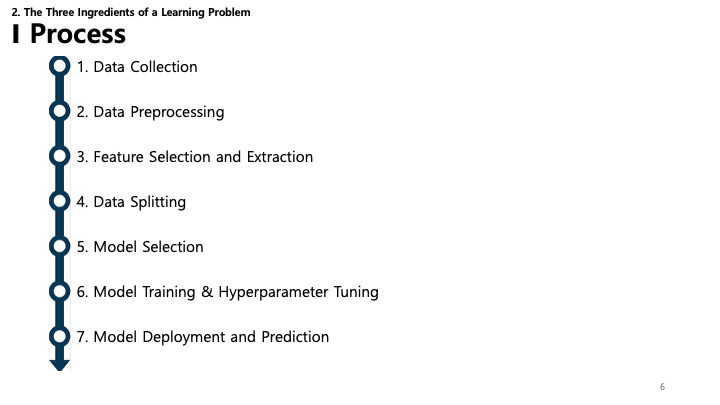
머신러닝 프로세스는 일련의 단계로 이루어집니다:
- 데이터 수집 (Data Collection): 원시 데이터 확보.
- 데이터 전처리 (Data Preprocessing): 데이터 정제 및 포맷팅.
- 특성 선택 및 추출 (Feature Selection and Extraction): 가장 관련성 높은 변수 식별.
- 데이터 분할 (Data Splitting): 훈련용과 테스트용 데이터로 분리.
- 모델 선택 (Model Selection): 적절한 알고리즘 선정.
- 모델 훈련 및 하이퍼파라미터 튜닝 (Model Training & Hyperparameter Tuning): 모델 학습 및 설정 최적화.
- 모델 배포 및 예측 (Model Deployment and Prediction): 실제 환경에서 모델 사용.
7. 데이터: 전처리 - 특성 스케일링
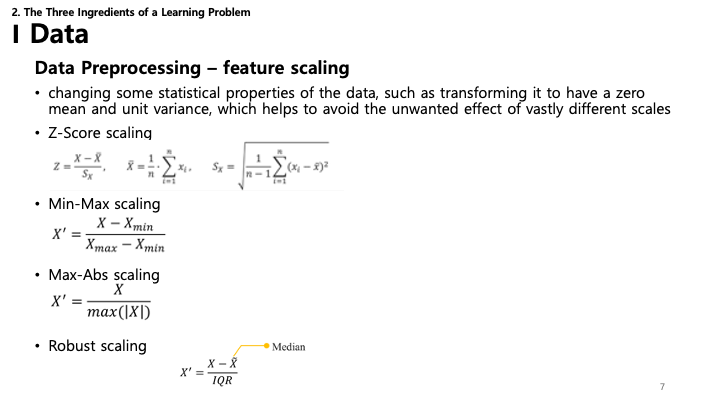
스케일링은 모든 특성이 결과에 동등하게 기여하도록 보장합니다.
- Z-Score 스케일링 (표준화): 데이터의 평균이 0, 분산이 1이 되도록 변환합니다.
- Min-Max 스케일링 (정규화): 데이터를 고정된 범위(보통 [0, 1])로 조정합니다.
- Max-Abs 스케일링: 절대값의 최대치를 기준으로 스케일링합니다.
- Robust 스케일링: 중앙값(Median)과 사분위수 범위(IQR)를 사용하여 이상치(Outlier)에 강건하게 만듭니다.
8. 데이터: 전처리 - 차원 축소
입력 변수의 수를 줄이면 모델 성능을 높이고 계산량을 줄일 수 있습니다.
- 특성 선택 (Feature Selection): 관련 있는 특성의 부분 집합을 선택 (예: mRMR, SVM-RFE).
- 특성 추출 (Feature Extraction): 기존 특성으로부터 새로운 특성 생성 (예: PCA, Autoencoder).
- 특성 공학 (Feature Engineering): 도메인 지식을 활용하여 머신러닝 알고리즘이 더 잘 작동하도록 특성을 생성.
9. 데이터: 전처리 - 원-핫 인코딩
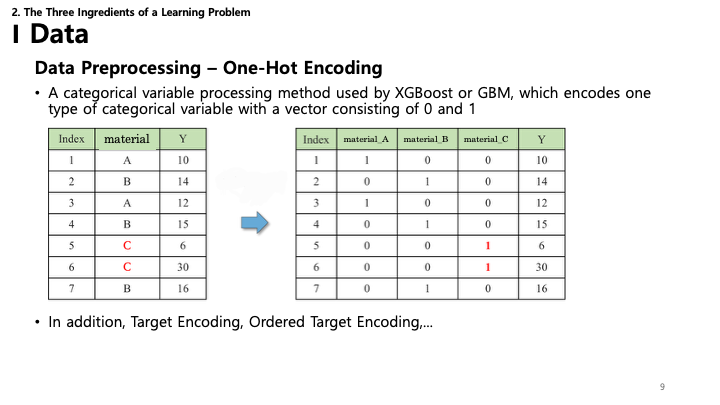
- 원-핫 인코딩 (One-Hot Encoding): 범주형(categorical) 변수를 0과 1로 이루어진 이진 행렬로 변환하여 머신러닝 알고리즘이 처리할 수 있게 합니다.
- 그 외 Target Encoding, Ordered Target Encoding 등의 방법이 있습니다.
10. 모델: 결정론적 vs 확률론적
불확실성을 다루는 방식에 따라 모델을 분류할 수 있습니다:
- 결정론적 모델 (Deterministic Model): 초기 조건과 파라미터에 의해 출력이 완전히 결정됩니다. 무작위성이 없습니다 (예: $F=ma$와 같은 물리 법칙).
- 확률론적 모델 (Probabilistic Model): 무작위성을 포함합니다. 단일 출력 대신 가능한 결과에 대한 확률 분포를 제공합니다. 노이즈가 많은 데이터나 내재적 불확실성을 다룰 때 중요합니다.
11. 모델: 결정론적 vs 통계적
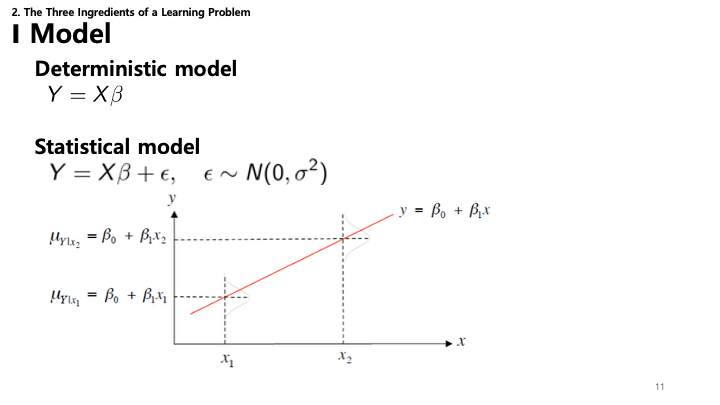
- 결정론적 모델: $Y = X\beta$ 와 같은 정확한 관계를 가정합니다. 입력 $X$와 파라미터 $\beta$를 알면 $Y$를 정확히 알 수 있다고 봅니다.
- 통계적 모델: 세상이 노이즈로 차 있음을 인정합니다. 관계를 $Y = X\beta + \epsilon$ 로 모델링하며, 여기서 $\epsilon$은 오차항(보통 정규분포 $\epsilon \sim N(0, \sigma^2)$ 가정)입니다. 실제 데이터의 변동성을 고려합니다.
12. 손실 (Loss): 분류 (Classification)
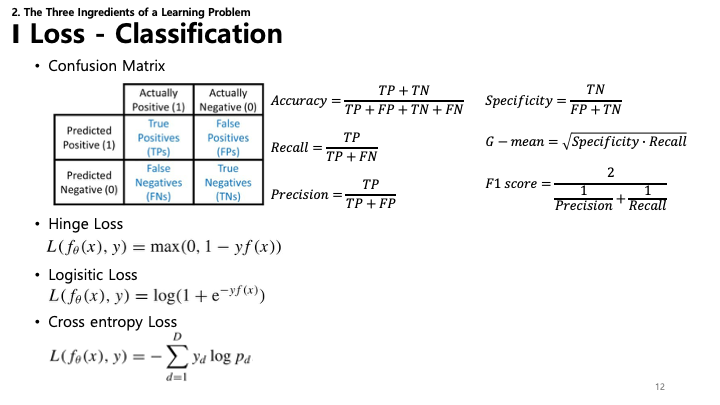
분류 문제(출력이 범주인 경우)의 성능 평가:
- 오차 행렬 (Confusion Matrix): 모델의 성능(True Positives, False Positives 등)을 나타내는 표.
- 지표 (Metrics): 오차 행렬에서 파생된 정확도(Accuracy), 특이도(Specificity), 재현율(Recall), 정밀도(Precision), F1 점수.
- 손실 함수 (Loss Functions):
- Hinge Loss: “최대 마진” 분류에 사용되며, 서포트 벡터 머신(SVM)에서 주로 쓰입니다.
- Logistic Loss: 로지스틱 회귀에서 사용.
- Cross-entropy Loss: 출력이 0과 1 사이의 확률 값인 분류 모델의 성능을 측정.
13. 손실 (Loss): 회귀 (Regression)
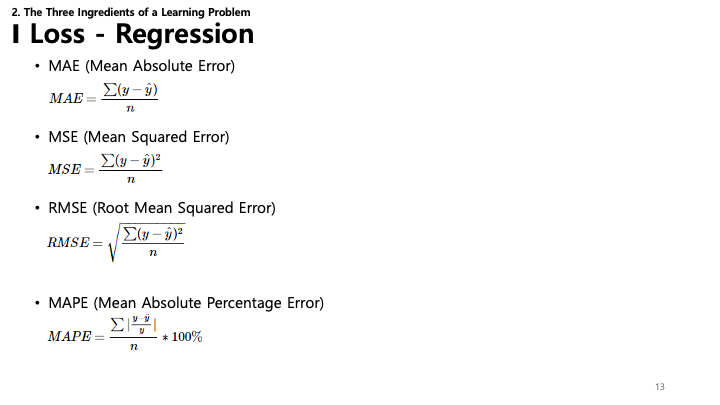
회귀 문제(연속적인 값을 예측)의 일반적인 손실 함수:
- MAE (Mean Absolute Error): 예측값과 실제값 차이의 절대값 평균.
- MSE (Mean Squared Error): 차이의 제곱 평균. 큰 오차에 더 큰 페널티를 부여.
- RMSE (Root Mean Squared Error): MSE의 제곱근. 오차의 단위를 타겟 변수와 같게 만듦.
- MAPE (Mean Absolute Percentage Error): 예측 정확도를 백분율로 측정.
14. 지도 학습의 위험 최소화
지도 학습의 핵심 목표는 **위험 최소화(Risk Minimization)**입니다. 두 가지 주요 개념이 있습니다:
- 비용 함수 (Cost Function): 예측값과 실제값 사이의 오차를 수치화하는 수학 공식.
- 최적화 (Optimization): 비용 함수를 최소화하기 위해 모델 파라미터를 조정하는 과정.
15. 비용 함수와 정규화
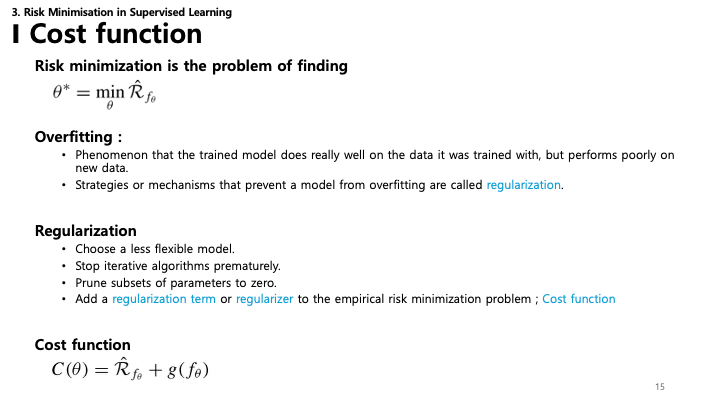
- 위험 최소화 문제: 경험적 위험(Empirical Risk) $\hat{R}_{f_\theta}$를 최소화하는 최적의 파라미터 $\theta^*$를 찾는 것입니다.
- 과적합 (Overfitting): 모델이 훈련 데이터를 너무 잘 학습하여 노이즈나 이상치까지 반영하게 되어, 새로운 데이터에 대한 성능이 떨어지는 현상.
- 정규화 (Regularization): 과적합을 방지하는 기법.
- 덜 유연한 모델 선택.
- 조기 종료 (Early Stopping).
- 파라미터 가지치기 (0으로 설정).
- 비용 함수에 정규화 항(Regularization term) 추가.
- 최종 비용 함수: $C(\theta) = \hat{R}_{f_\theta} + g(f_\theta)$ (여기서 $\hat{R}$은 위험(오차), $g$는 정규화 항).
16. 과적합(Overfitting) vs 과소적합(Underfitting)
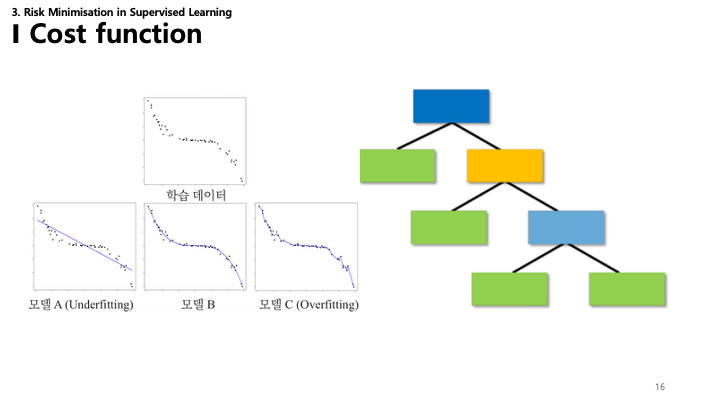
회귀와 결정 트리를 예로 들어 과소적합과 과적합을 시각화합니다:
- 모델 A (과소적합): 모델이 데이터의 패턴을 담기에 너무 단순함(직선). 편향(Bias)이 높음.
- 모델 B: 노이즈를 쫓지 않고 데이터의 트렌드를 잘 반영함.
- 모델 C (과적합): 모델이 너무 복잡하여 훈련 데이터의 노이즈까지 학습함. 일반화 성능이 떨어짐.
17. 비용 함수 예시: 정규화
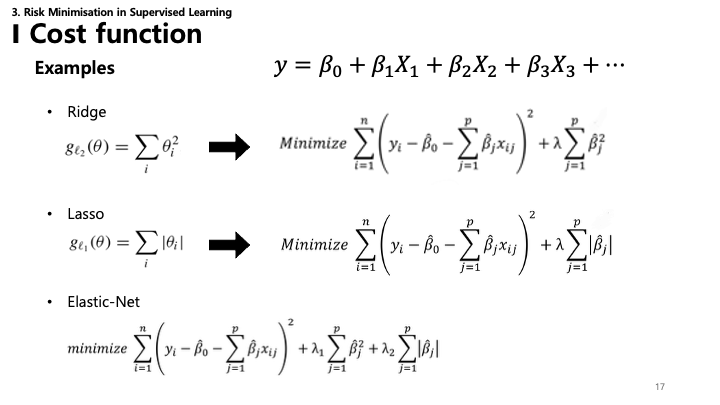
일반적인 정규화 기법은 비용 함수에 페널티 항을 추가합니다:
- 릿지 회귀 (Ridge Regression, $\ell_2$): 계수의 제곱합을 추가.
- $g_{\ell_2}(\theta) = \sum \theta_i^2$
- 라쏘 회귀 (Lasso Regression, $\ell_1$): 계수의 절대값 합을 추가. 일부 계수를 0으로 만들어 변수 선택(Feature Selection) 효과가 있음.
- $g_{\ell_1}(\theta) = \sum |\theta_i|$
- 엘라스틱 넷 (Elastic-Net): $\ell_1$과 $\ell_2$ 페널티를 결합.
- $\lambda_1 \sum |\theta_i| + \lambda_2 \sum \theta_i^2$
18. VC 차원 (Vapnik-Chervonenkis Dimension)
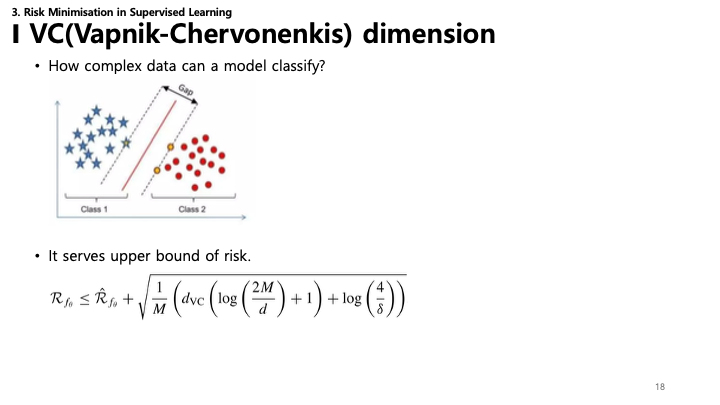
VC 차원은 통계적 분류 알고리즘의 용량(복잡도)을 측정합니다.
- 개념: “이 모델이 얼마나 복잡한 데이터셋을 분류할 수 있는가?”
- 위험 한계 (Risk Bound): 테스트 오차(위험)에 대한 이론적 상한선을 제공합니다.
- $\mathcal{R}_{f_\theta} \leq \hat{\mathcal{R}}_{f_\theta} + \sqrt{\frac{1}{M} \left( d_{VC} \left( \log \left( \frac{2M}{d} \right) + 1 \right) + \log \left( \frac{4}{\delta} \right) \right)}$
- 이 식은 VC 차원($d_{VC}$)이 커질수록(모델이 복잡할수록) 훈련 오차($\hat{\mathcal{R}}$)와 실제 위험($\mathcal{R}$) 사이의 간격이 커져 과적합 가능성이 높아짐을 보여줍니다.
19. 최적화: 경사 하강법 (Gradient Descent)
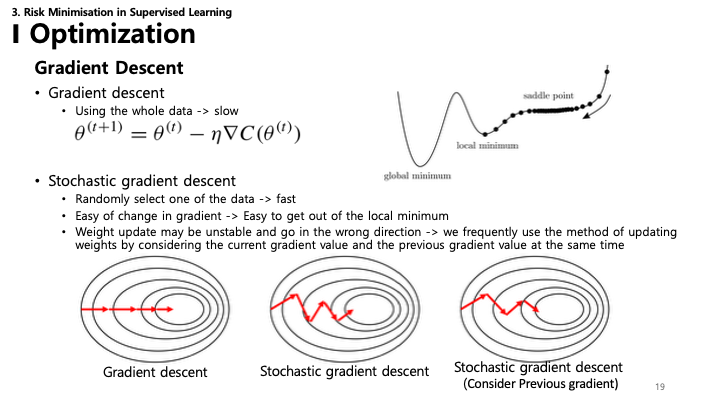
비용 함수를 최소화하는 파라미터를 찾기 위한 최적화 알고리즘입니다.
- 경사 하강법 (GD): 전체 데이터셋을 사용하여 기울기를 계산하고 파라미터를 업데이트합니다.
- $\theta^{(t+1)} = \theta^{(t)} - \eta \nabla C(\theta^{(t)})$
- 장점: 안정적인 수렴.
- 단점: 대규모 데이터셋에서 느림; 지역 최솟값(Local Minima)에 빠질 수 있음.
- 확률적 경사 하강법 (SGD): 한 번에 하나의 랜덤 데이터 포인트를 사용하여 파라미터를 업데이트합니다.
- 장점: 빠름; 지역 최솟값을 탈출할 가능성이 높음.
- 단점: 수렴 경로가 불안정(노이즈가 심함).
20. 미니 배치 경사 하강법 (Mini-batch Gradient Descent)
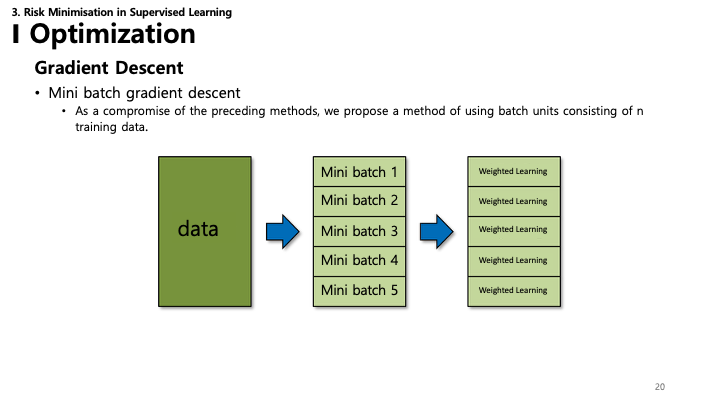
- 미니 배치 경사 하강법: Batch GD와 SGD의 절충안.
- 데이터를 작은 그룹(배치, 크기 $n$)으로 나누어 처리합니다.
- SGD보다 수렴이 안정적이며, 행렬 연산을 활용해 Batch GD보다 계산 효율이 좋습니다.
21. 비지도 학습의 훈련
비지도 학습에서는 레이블이 없기 때문에 지도 학습처럼 “정답"과의 오차를 최소화하는 방식으로 훈련할 수 없습니다. 대신 데이터 자체의 확률적 구조를 모델링하는 방법을 사용합니다.
- 최대 우도 추정 (Maximum Likelihood Estimation, MLE): 비지도 학습 모델을 훈련하는 데 가장 널리 사용되는 방법입니다.
- 핵심 아이디어: “이 데이터를 관측했을 때, 어떤 모델 파라미터 $\Theta$였다면 가장 그럴 듯한가?“를 역으로 추론합니다.
- 예: 키 데이터가 주어졌을 때, 이 데이터를 가장 잘 설명하는 가우시안 분포의 평균($\mu$)과 분산($\sigma^2$)을 찾습니다.
- 지도 학습과의 차이: 지도 학습에서는 경험적 위험(예측 오차)을 최소화하지만, 비지도 학습에서는 데이터의 우도(likelihood)를 최대화합니다.
- 활용 예시: 군집 분석(GMM), 생성 모델(RBM, VAE) 훈련 등에 MLE를 사용합니다.
22. 최대 우도 추정 (수식)
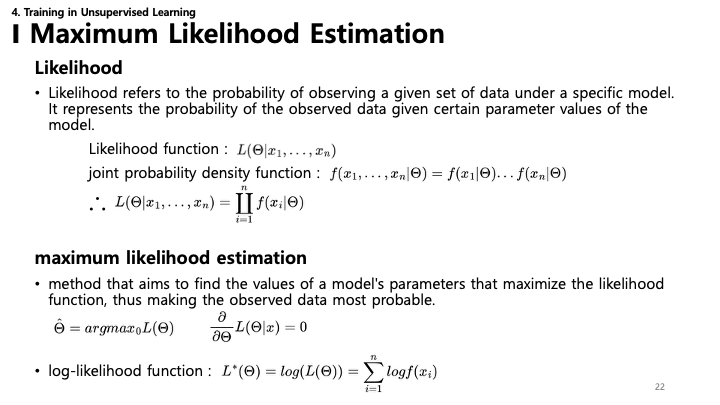
**우도(Likelihood)**는 특정 모델 하에서 주어진 데이터가 관측될 확률을 의미합니다.
- 우도 함수: $L(\Theta|x_1, ..., x_n)$
- 결합 확률 밀도: $f(x_1, ..., x_n|\Theta) = f(x_1|\Theta)...f(x_n|\Theta)$ (독립 가정 시)
- MLE의 목표: 이 우도 함수를 최대화하는(즉, 관측된 데이터를 가장 잘 설명하는) 파라미터 $\hat{\Theta}$를 찾는 것.
- $\hat{\Theta} = argmax_\Theta L(\Theta)$
- 실제로는 곱셈을 덧셈으로 바꿔 미분을 쉽게 하기 위해 **로그 우도(Log-likelihood)**를 최대화합니다:
- $L^*(\Theta) = \log(L(\Theta)) = \sum \log f(x_i)$
23. 최대 우도 추정 (시각화)
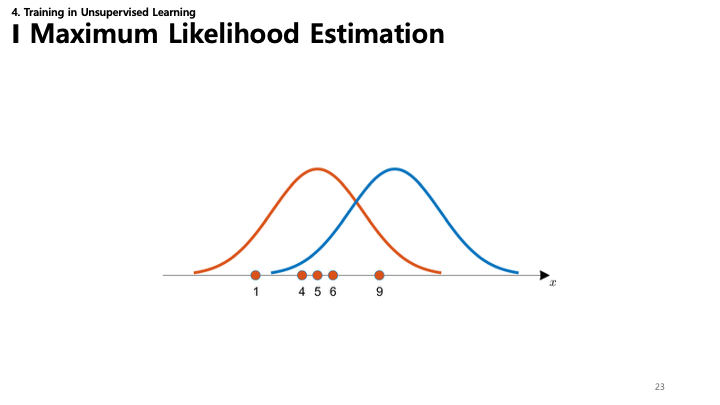
MLE를 시각화한 그래프입니다. 데이터 포인트(주황색 점)에 가장 잘 맞는 분포(가우시안 등)를 찾으려 합니다.
- 파란색 곡선은 데이터와 잘 맞지 않는(우도가 낮은) 파라미터를 가진 모델입니다.
- 주황색 곡선은 데이터를 더 잘 설명합니다(우도가 높음). MLE는 데이터를 “가장 잘” 설명하는 곡선을 찾습니다.
24. 머신러닝 기법들
일반적인 기법들:
- 선형 모델 (Linear Models): 단순하고 해석 가능한 모델 (예: 선형 회귀, 로지스틱 회귀).
- 신경망 (Neural Networks): 생물학적 뉴런에서 영감을 받은 강력한 모델, 복잡한 패턴 학습 가능.
- 그래피컬 모델 (Graphical Models): 확률 변수 간의 조건부 의존성을 그래프로 표현 (예: 베이지안 네트워크).
- 커널 방법 (Kernel Methods): 커널 함수를 사용해 고차원 특징 공간에서 작동하는 알고리즘 (예: SVM).
25. 선형 모델 (Linear Models)
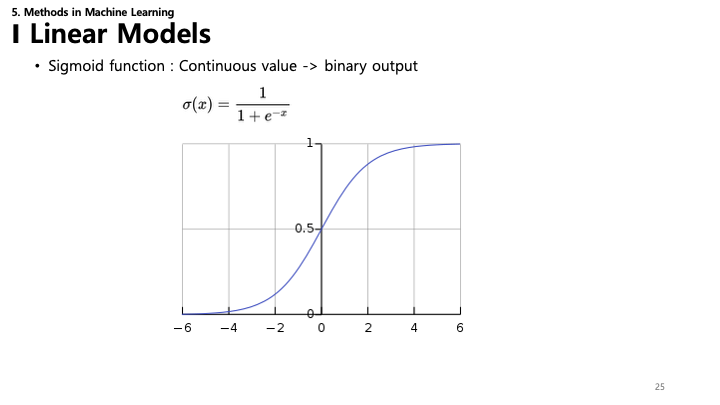
- 시그모이드 함수 (Sigmoid Function): 선형 분류(예: 로지스틱 회귀)와 신경망의 핵심 요소.
- $\sigma(x) = \frac{1}{1 + e^{-x}}$
- 실수 입력을 0과 1 사이의 값으로 매핑하여, 연속적인 값을 확률(이진 출력)로 변환합니다.
26. 선형 모델: 최소 제곱법 & SVD
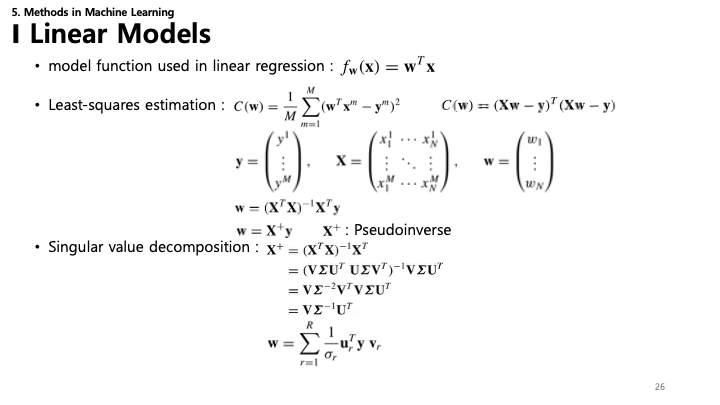
- 선형 회귀 모델: $f_w(x) = w^Tx$
- 최소 제곱법 (Least-squares Estimation): 예측값과 실제값 차이의 제곱합을 최소화하여 최적의 가중치 $w$를 찾습니다.
- $C(w) = \frac{1}{M} \sum (w^Tx^m - y^m)^2$
- 해석적 해: 공식 $w_{opt} = (X^TX)^{-1}X^Ty$를 통해 직접 계산 가능.
- 특이값 분해 (SVD): 선형 최소 제곱 문제를 풀 때 유사역행렬($X^+$)을 계산하는 데 자주 사용되는 행렬 분해 방법으로, 수치적으로 안정적인 해를 제공합니다.
27. 선형 모델: MSE
- 평균 제곱 오차 (MSE): 회귀 문제의 표준 비용 함수.
- $MSE = \frac{1}{n} \sum (y - \hat{y})^2$
- 추정값($\hat{y}$)과 실제값($y$) 차이의 제곱 평균을 측정합니다.
28. 신경망: 퍼셉트론 & MLP
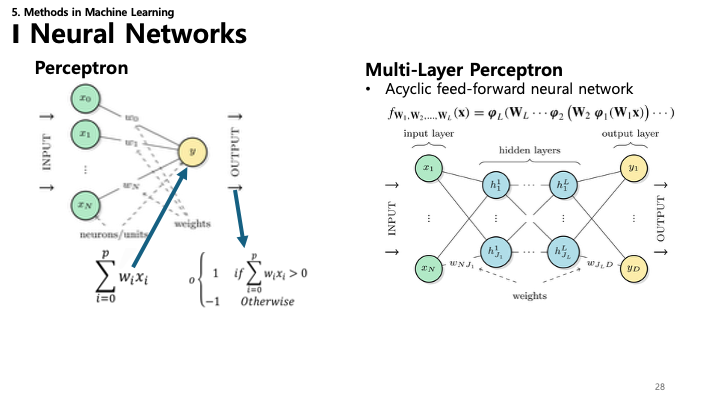
- 퍼셉트론 (Perceptron): 가장 단순한 인공 뉴런. 여러 입력($x$)에 가중치($w$)를 곱해 합산한 후, 활성화 함수를 통과시켜 출력을 만듭니다.
- 다층 퍼셉트론 (MLP): 여러 층의 퍼셉트론(입력, 은닉, 출력층)으로 구성된 비순환 피드포워드 신경망.
- $f(x) = \phi_L(W_L ... \phi_2(W_2 \phi_1(W_1 x))...)$
- 활성화 함수와 다층 구조 덕분에 비선형 관계를 학습할 수 있습니다.
29. 신경망: 활성화 함수
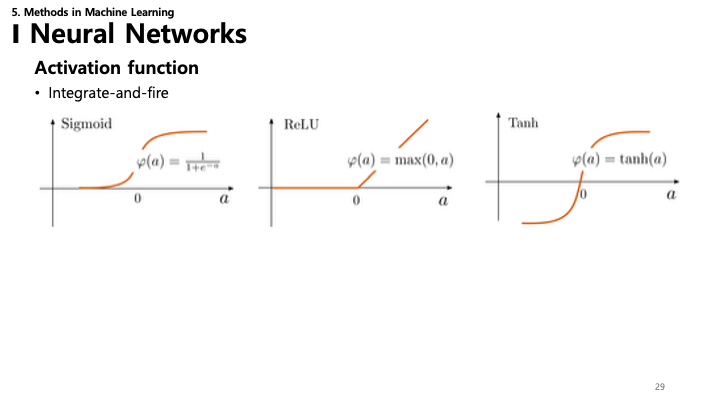
활성화 함수는 네트워크에 비선형성을 도입하여 복잡한 패턴을 학습하게 합니다.
- Sigmoid: $\sigma(x) = \frac{1}{1+e^{-x}}$. 출력 범위 (0, 1). 계단 함수를 부드럽게 만든 형태.
- ReLU (Rectified Linear Unit): $\phi(a) = \max(0, a)$. 출력 범위 [0, $\infty$). 기울기 소실(Vanishing Gradient) 문제를 해결하고 계산 효율이 좋음.
- Tanh (Hyperbolic Tangent): $\phi(a) = \tanh(a)$. 출력 범위 (-1, 1). 0을 중심으로 함.
30. 신경망: 역전파 (Backpropagation)
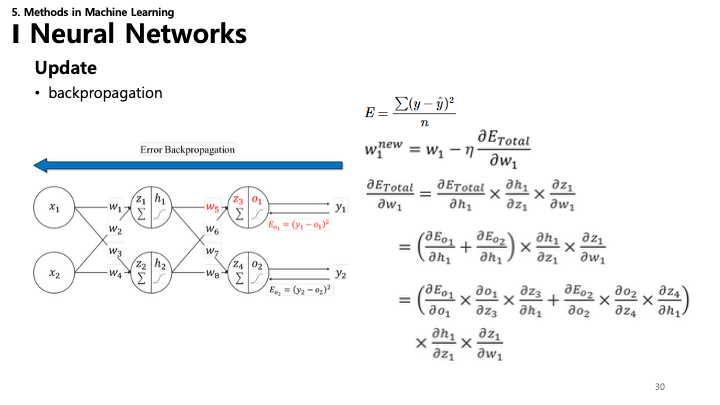
- 역전파: 신경망 훈련에 쓰이는 알고리즘.
- 손실 함수의 기울기($E$)를 네트워크의 각 가중치($w$)에 대해 효율적으로 계산합니다.
- 연쇄 법칙 (Chain Rule): 역전파의 핵심 수학 원리. 합성 함수의 미분은 구성 함수들의 미분 곱으로 계산할 수 있습니다.
- $\frac{\partial E}{\partial w} = \frac{\partial E}{\partial y} \cdot \frac{\partial y}{\partial h} \cdot \frac{\partial h}{\partial w}$
- 오차를 최소화하도록 가중치 업데이트: $w^{new} = w - \eta \frac{\partial E}{\partial w}$
31. 순환 신경망 (RNN)
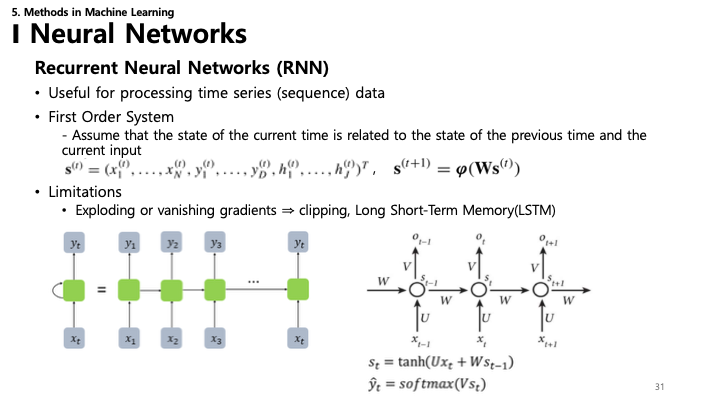
- RNN: 퍼셉트론과 논리 게이트의 장점을 결합.
- 시계열(Sequence) 데이터 처리에 유용.
- 1차 시스템 (First Order System):
- 현재 시간의 상태는 이전 시간의 상태와 현재 입력과 관련이 있다고 가정.
- $s^{(t)} = (x^{(t)}_1, ..., x^{(t)}_N, y^{(t)}_1, ..., y^{(t)}_D, h^{(t)}_1, ..., h^{(t)}_J)^T$
- $s^{(t+1)} = \varphi(Ws^{(t)})$
- 한계:
- 기울기 폭발 또는 소실 문제.
- 해결책: Gradient Clipping, LSTM (Long Short-Term Memory).
32. RNN 응용
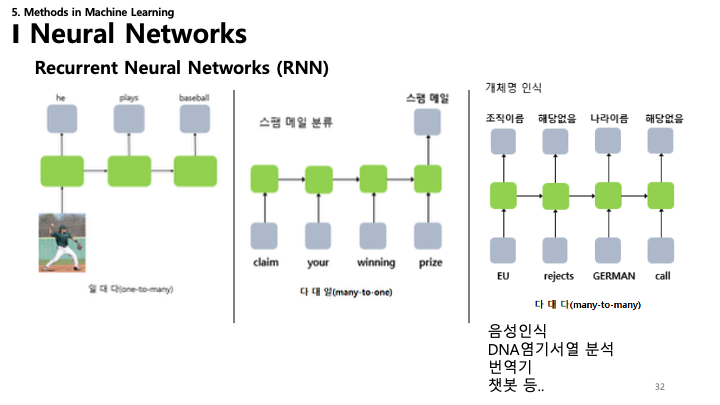
RNN은 다양한 “Many-to-Many” 또는 “Many-to-One” 작업에 활용됩니다:
- One-to-Many: 이미지 캡셔닝.
- Many-to-One: 감성 분석 (예: 스팸 분류).
- Many-to-Many: 기계 번역 (영-한), 개체명 인식 (NER), DNA 서열 분석, 챗봇.
33. 홉필드 네트워크 (Hopfield Networks)
- 홉필드 네트워크: 피드백 루프가 있는 단순한 형태의 순환 신경망.
- 연상 메모리 (Associative Memory): 단 하나의 샘플만으로 패턴을 기억할 수 있음 (One-shot learning).
- 구조: 대칭적 완전 연결 ($w_{ij} = w_{ji}$), 자기 연결 없음 ($w_{ii} = 0$).
- 용량: $N$개의 노드를 가진 네트워크는 약 $0.15N$개의 패턴을 저장 가능 (예: 뉴런 100개 $\approx$ 패턴 15개).
- 수식:
- 이진화(Bipolarization): $X_i = 2a_i - 1$
- 가중치 업데이트: $w_{ij} = \sum_m x_i^m x_j^m$
- 업데이트 규칙: $z = \sum_{j \neq i} w_{ij} x_j$, $x_i = \text{sign}(z)$
- 에너지 함수: $E_W(\mathbf{x}) = -\frac{1}{2}\mathbf{x}^T \mathbf{W} \mathbf{x} = -\frac{1}{2} \sum_{i,j=1} w_{ij}x_i x_j$
34. 홉필드 네트워크: 복원 (Recovery)
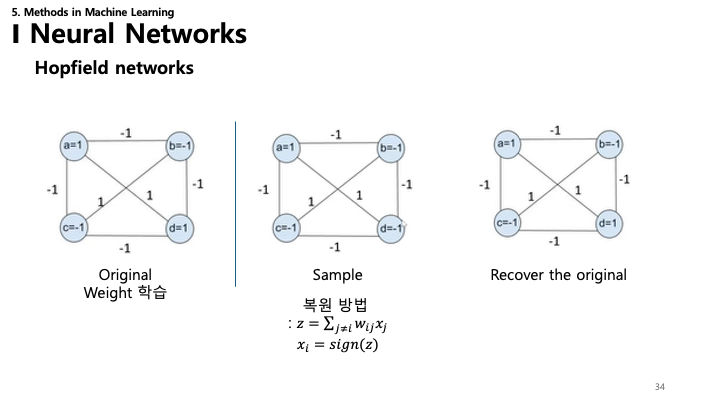
복원 과정을 보여주는 슬라이드:
- Original: 네트워크가 학습한 안정된 상태.
- Sample: 손상되거나 일부분만 있는 패턴.
- Recovery: 네트워크는 에너지를 최소화하는 방향으로 업데이트 규칙 $x_i = \text{sign}(\sum w_{ij}x_j)$을 반복하여, 결과적으로 원래의 안정된 상태(Attractor)로 수렴합니다.
35. 홉필드 네트워크: 예시
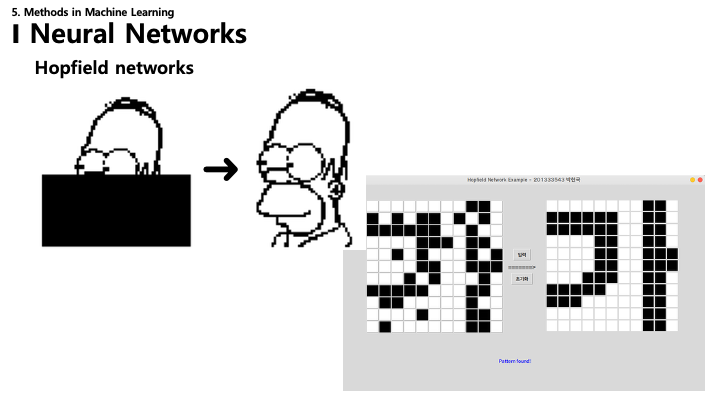
- 홉필드 네트워크가 부분적으로 가려지거나 노이즈가 섞인 입력으로부터 전체 이미지(예: 호머 심슨, 문자 ‘가’)를 복원하는 시각적 예시.
- 내용 기반 주소 지정 메모리(Content-Addressed Memory) 시스템으로 작동합니다.
36. 볼츠만 머신 (Boltzmann Machines)
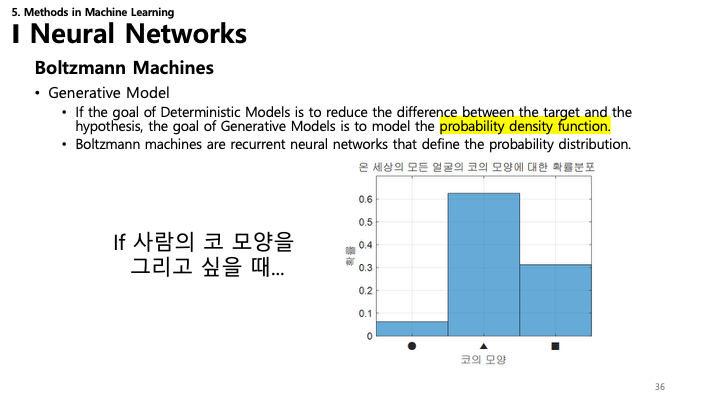
- 생성 모델 (Generative Model): 타겟 $y$를 예측하는 결정론적 모델과 달리, 데이터의 확률 밀도 함수를 모델링합니다.
- 구조: 시스템 상태에 대한 확률 분포를 정의하는 확률적 순환 신경망.
- 예: 코 모양의 확률 분포를 모델링하여 새롭고 현실적인 코 이미지를 생성.
37. 제한된 볼츠만 머신 (RBM)
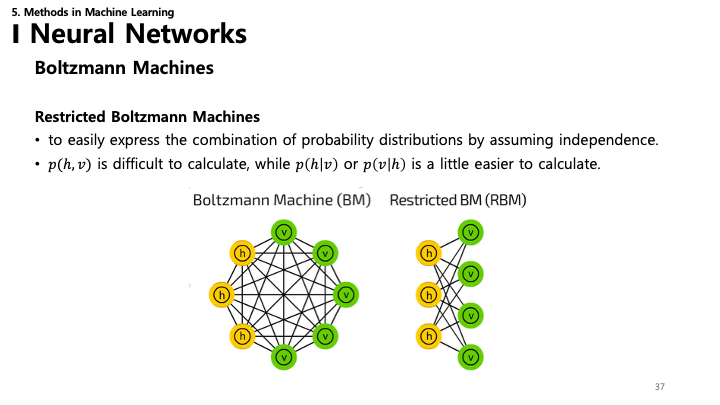
- RBM: 학습하기 쉽도록 설계된 볼츠만 머신의 변형.
- 제한 (Restriction): 같은 층 내의 연결이 없습니다 (가시-가시 또는 은닉-은닉 연결 없음). 연결은 가시층($v$)과 은닉층($h$) 사이에만 존재합니다.
- 독립성: 이 구조 덕분에 가시 노드가 주어졌을 때 은닉 노드들은 서로 독립적(반대의 경우도 성립)이 되어, 조건부 확률 $p(h|v)$ 및 $p(v|h)$ 계산이 단순해집니다.
38. RBM: 수식
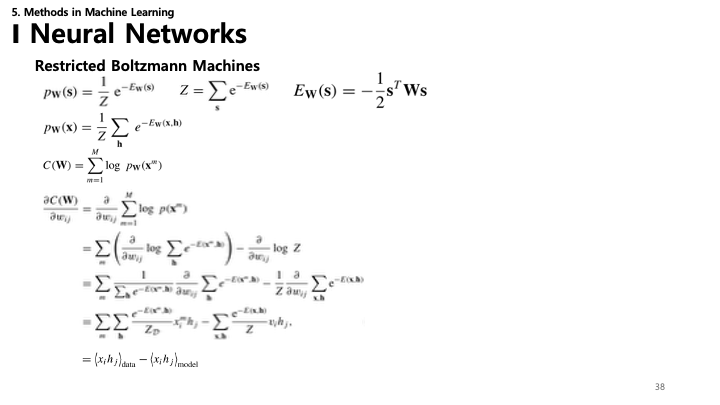
- 에너지 함수: $E_W(\mathbf{s}) = -\frac{1}{2}\mathbf{s}^T \mathbf{W} \mathbf{s}$ (단순화된 형태).
- 확률: $p_W(\mathbf{s}) = \frac{1}{Z} e^{-E_W(\mathbf{s})}$, 여기서 $Z = \sum_s e^{-E_W(\mathbf{s})}$는 분배 함수(Partition Function).
- 기울기 계산:
- 로그 우도의 기울기에는 두 항이 포함됩니다:
- $\frac{\partial C(\mathbf{W})}{\partial w_{ij}} = \langle x_i h_j \rangle_{\text{data}} - \langle x_i h_j \rangle_{\text{model}}$
- 첫 번째 항(Positive Phase)은 데이터로부터 쉽게 계산되지만, 두 번째 항(Negative Phase)은 모델 자체에서의 샘플링이 필요하여 계산이 어렵습니다.
39. 깁스 샘플링 (Gibbs Sampling)
- 샘플링: 모델 기댓값 $\langle x_i h_j \rangle_{\text{model}}$ 계산이 어렵기 때문에 깁스 샘플링으로 근사합니다.
- 과정: 변수들의 조건부 분포에서 샘플을 추출하여 반복적으로 값을 업데이트합니다.
- 평형 도달 (Thermalization): 체인이 평형 상태(진정한 분포)에 도달하려면 오랜 시간(많은 단계)이 걸립니다.
- 속도를 높이기 위해 **Contrastive Divergence (CD)**가 제안되었습니다.
40. Contrastive Divergence (CD)
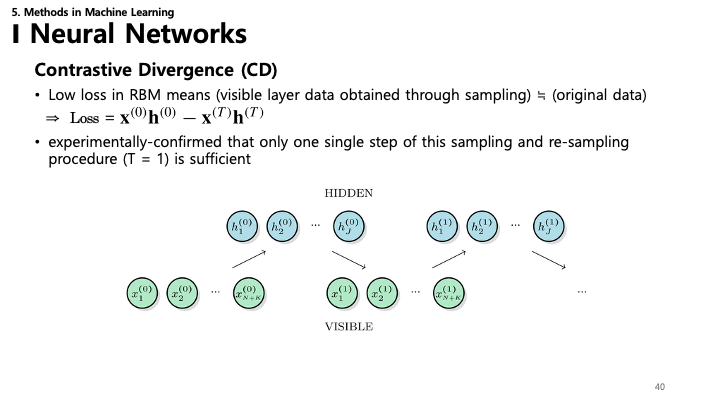
- Contrastive Divergence: RBM 훈련을 위한 효율적인 근사 알고리즘.
- 아이디어: 체인이 수렴할 때까지 기다리는 대신, 깁스 체인을 $k$ 단계만 실행합니다 (주로 $k=1$, CD-1이라 함).
- 업데이트 규칙: $\text{Loss} \approx \mathbf{x}^{(0)}\mathbf{h}^{(0)} - \mathbf{x}^{(k)}\mathbf{h}^{(k)}$
- 실험적으로 단 한 번의 단계($T=1$)만으로도 좋은 특징을 학습하기에 충분한 경우가 많습니다.
41. 그래피컬 모델 (Graphical Models)
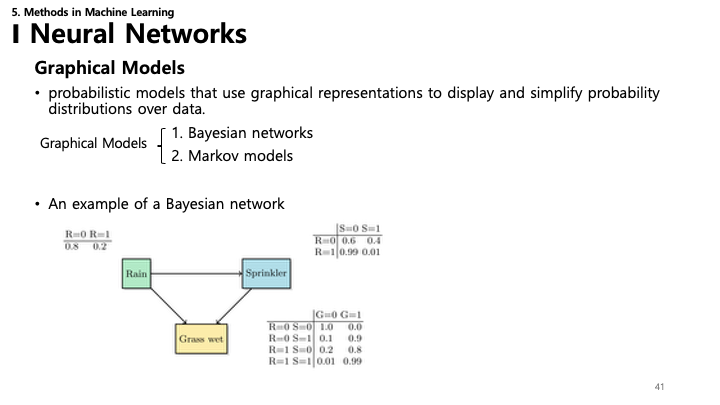
- 그래피컬 모델: 데이터에 대한 확률 분포를 그래프로 표현하고 단순화하는 확률론적 모델.
- 종류:
- Bayesian Networks: 방향성 비순환 그래프 (DAG).
- Markov Models: 무방향성 그래프 (Markov Random Fields).
- 베이지안 네트워크 예시: “비-스프링클러-잔디 젖음” 모델은 인과 관계와 조건부 확률을 보여줍니다.
42. 베이지안 네트워크
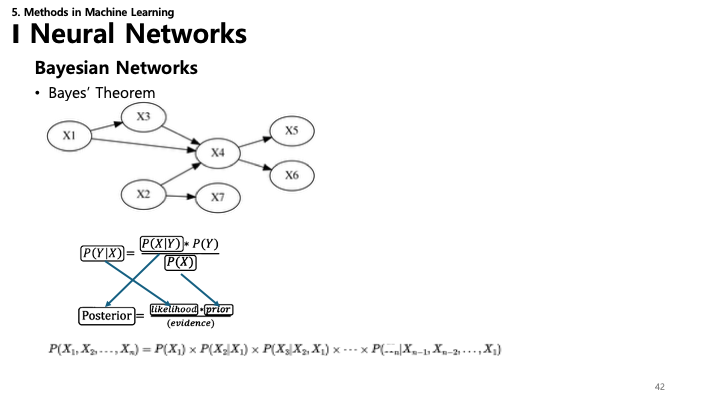
- 분해 (Factorization): 결합 확률 분포는 그래프 구조에 따라 조건부 확률들의 곱으로 분해됩니다.
- $P(X_1, ..., X_n) = \prod_{i} P(X_i | \text{parents}(X_i))$
- 베이즈 정리: 추론(증거에 기반한 확률 업데이트)의 기초.
- $P(Y|X) = \frac{P(X|Y) P(Y)}{P(X)}$
- 사후 확률 (Posterior) = (우도 $\times$ 사전 확률) / 증거
43. 은닉 마르코프 모델 (HMM)
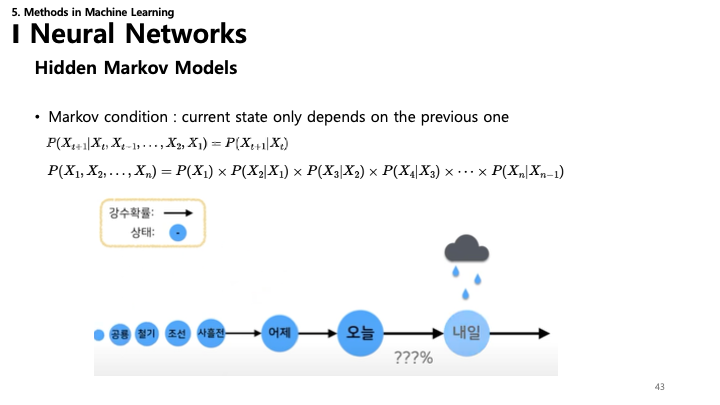
- 마르코프 가정: 현재 상태는 오직 바로 이전 상태에만 의존하며, 전체 과거와는 무관하다는 가정.
- $P(X_{t+1} | X_t, ..., X_1) = P(X_{t+1} | X_t)$
- 구조: 관측된 사건을 생성하는 보이지 않는(은닉된) 일련의 상태들.
- 예: 오늘의 날씨(은닉)를 보고 내일의 날씨 예측하기, 또는 관측된 행동(우산 쓰기)을 보고 날씨 추론하기.
44. HMM: 전이 & 방출
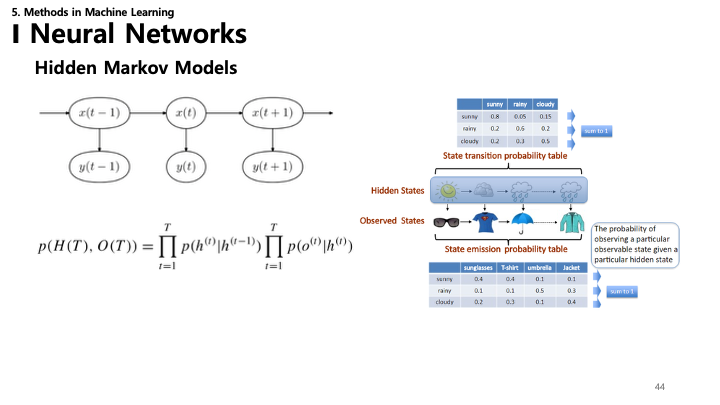
HMM은 두 가지 확률 테이블로 특징지어집니다:
- 상태 전이 확률 (State Transition Probability): 한 은닉 상태에서 다른 상태로 이동할 확률 (예: 맑음 $\rightarrow$ 비).
- 방출 확률 (Emission Probability): 은닉 상태가 주어졌을 때 특정 결과가 관측될 확률 (예: “비” 상태에서 “우산” 관측).
- 결합 확률:
- $p(H, O) = \prod_{t=1}^T p(h^{(t)} | h^{(t-1)}) \prod_{t=1}^T p(o^{(t)} | h^{(t)})$
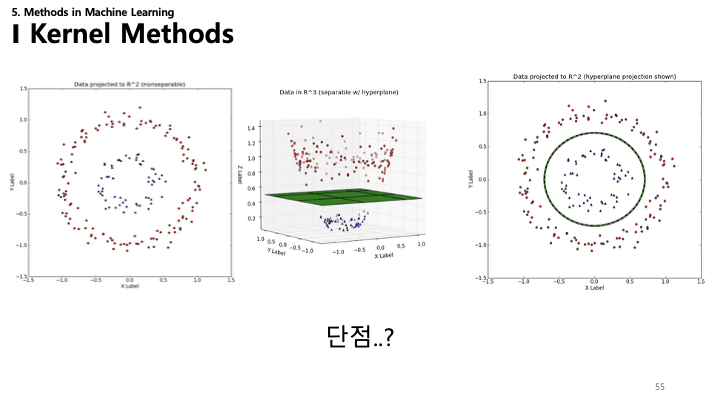
45. 커널 방법 (Kernel Methods)
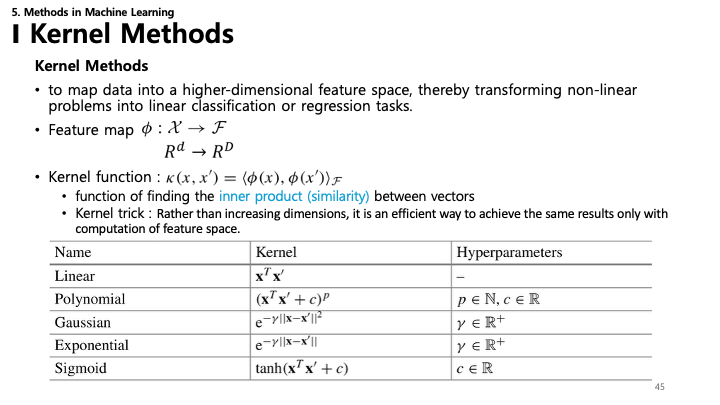
- 목표: 데이터를 고차원 특징 공간으로 매핑하여 비선형 문제를 선형 문제로 변환하는 것.
- 특징 맵 (Feature Map): $\phi: \mathcal{X} \rightarrow \mathcal{F}$ ($R^d \rightarrow R^D$).
- 커널 함수 (Kernel Function): $\kappa(x, x') = \langle \phi(x), \phi(x') \rangle_{\mathcal{F}}$
- 고차원 좌표를 명시적으로 계산하지 않고도 유사도(내적)를 직접 계산합니다.
- 일반적인 커널:
- Linear: $x^T x'$
- Polynomial: $(x^T x' + c)^P$
- Gaussian (RBF): $e^{-\gamma ||x - x'||^2}$
- Sigmoid: $\tanh(x^T x' + c)$
46. 커널 방법: 시각화
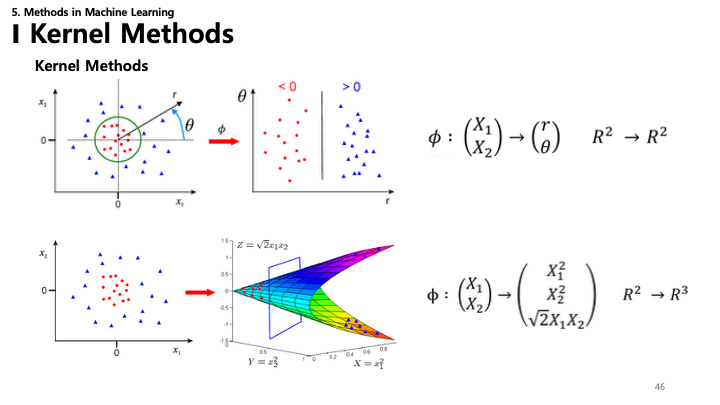
- 2D to 2D: 좌표 변환(예: 극좌표)으로 동심원 데이터를 선형적으로 분리 가능.
- 2D to 3D: 2D 데이터($X_1, X_2$)를 3D($X_1^2, X_2^2, \sqrt{2}X_1X_2$)로 매핑하면 포물면이 되어 평면으로 데이터 분리 가능.
47. 커널 밀도 추정 (KDE)
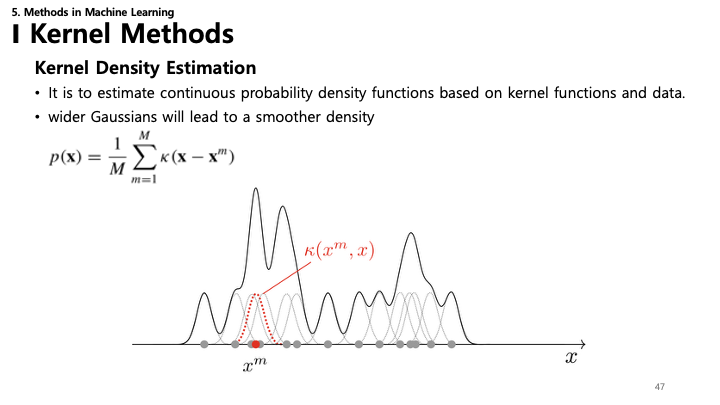
- KDE: 확률 변수의 확률 밀도 함수(PDF)를 추정하는 비모수적 방법.
- 방법: 각 데이터 포인트에 커널(예: 가우시안 분포)을 중심에 두고 모두 합산합니다.
- $p(\mathbf{x}) = \frac{1}{M} \sum_{m=1}^M \kappa(\mathbf{x} - \mathbf{x}^m)$
- 스무딩: 커널이 넓을수록(분산이 클수록) 밀도 추정치가 더 부드러워집니다.
48. K-최근접 이웃 (KNN)
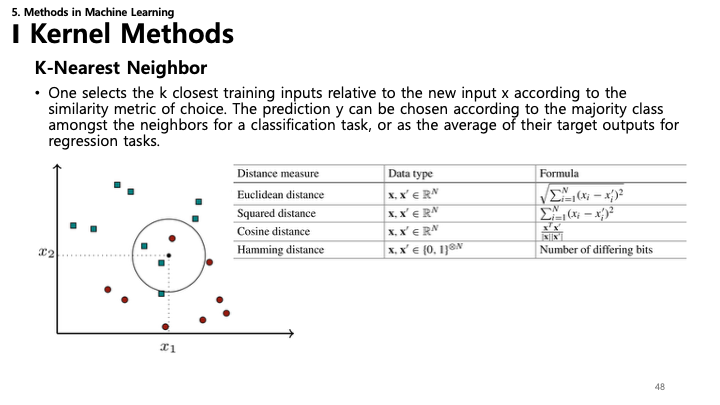
- KNN: 단순한 인스턴스 기반 학습 알고리즘.
- 논리: 가장 가까운 $k$개의 이웃 중 다수결에 따라 새로운 포인트를 분류.
- 거리 측정법:
- Euclidean: $\sqrt{\sum (x_i - x_i')^2}$
- Squared: $\sum (x_i - x_i')^2$
- Cosine: $\frac{\mathbf{x}^T \mathbf{x}'}{||\mathbf{x}|| ||\mathbf{x}'||}$ (각도 기반 유사도)
- Hamming: 다른 비트의 개수 (이진 데이터용).
49. 서포트 벡터 머신 (SVM)
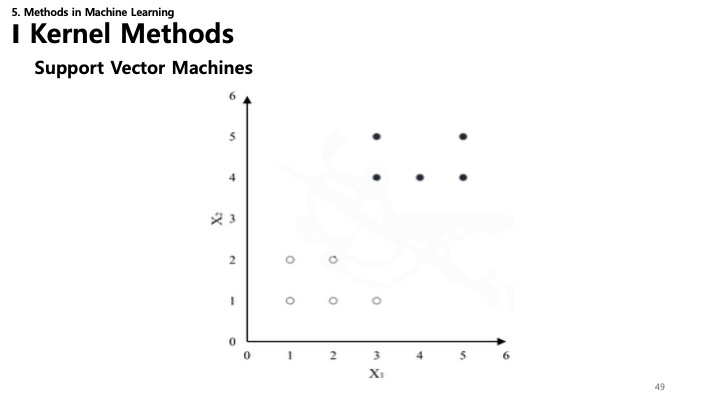
- SVM: 클래스 간의 최적 경계선을 찾는 데 초점을 맞춥니다.
- 서포트 벡터 (Support Vectors): 결정 경계에 가장 가까이 있는 데이터 포인트들. 이들이 경계를 “지지"하거나 정의합니다.
- 마진 (Margin): 결정 경계와 서포트 벡터 사이의 거리. SVM은 이 마진($d_1 + d_2$)을 최대화하려고 합니다.
50. SVM: 마진
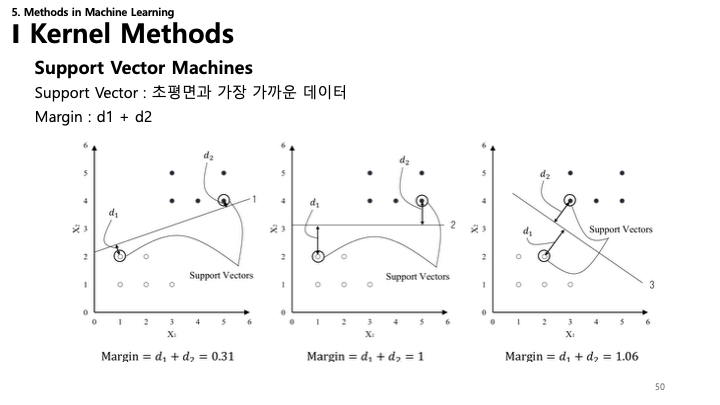
- 마진 구성 요소($d_1$, $d_2$) 시각적 설명.
- 마진을 최대화하면 일반화 성능이 좋아집니다. 마진이 클수록 모델이 더 확신을 가지며 노이즈에 강건하다는 뜻입니다.
51. SVM: 제약 조건
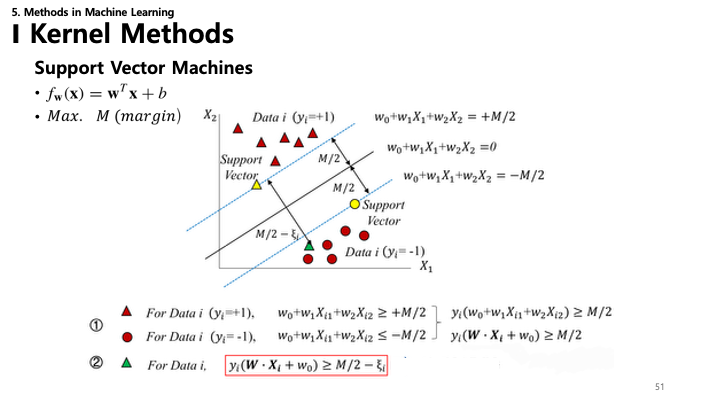
- 초평면 (Hyperplane): $w^T x + b = 0$
- 표준 초평면 (Canonical Hyperplanes): 서포트 벡터에서의 값이 $+1$ 또는 $-1$이 되도록 $w$와 $b$의 스케일을 조정합니다.
- $w_0 + w_1 X_{i1} + w_2 X_{i2} \geq +M/2$ ($y_i = +1$인 경우)
- $w_0 + w_1 X_{i1} + w_2 X_{i2} \leq -M/2$ ($y_i = -1$인 경우)
- 통합 제약 조건: $y_i (\mathbf{w} \cdot \mathbf{x}_i + w_0) \geq M/2 - \xi_i$ (여기서 $\xi_i$는 어느 정도의 오류 허용, 즉 Soft Margin을 의미).
52. SVM: 최적화 목표
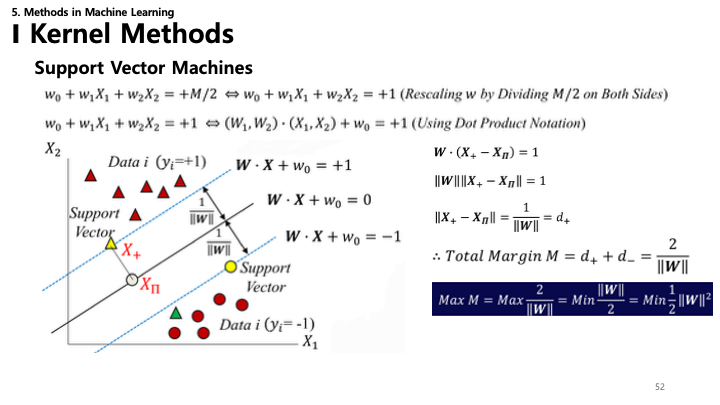
- 마진의 폭은 $\frac{2}{||w||}$로 주어집니다.
- 최적화: 마진($M$)을 최대화하려면 가중치 벡터의 크기 $||w||$를 최소화해야 합니다 (또는 $\frac{1}{2}||w||^2$ 최소화).
- $\text{Max } M = \text{Min } \frac{1}{2} ||w||^2$
53. SVM: 힌지 손실 (Hinge Loss)
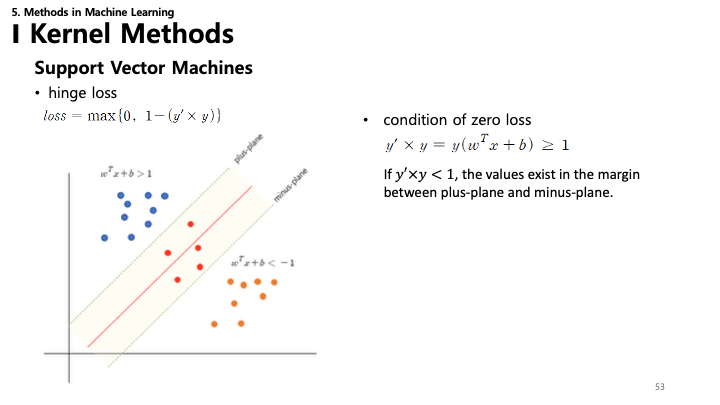
- Hinge Loss: SVM 훈련에 사용되는 손실 함수.
- $\text{loss} = \max\{0, 1 - (y' \times y)\}$
- 손실 0 조건: 샘플이 올바르게 분류되고 마진 바깥에 있다면($y' \times y \geq 1$) 손실은 0입니다.
- 페널티: 샘플이 마진 안쪽에 있거나 오분류되면($y' \times y < 1$) 손실이 선형적으로 증가합니다.
54. SVM: 라그랑주 및 쌍대 문제
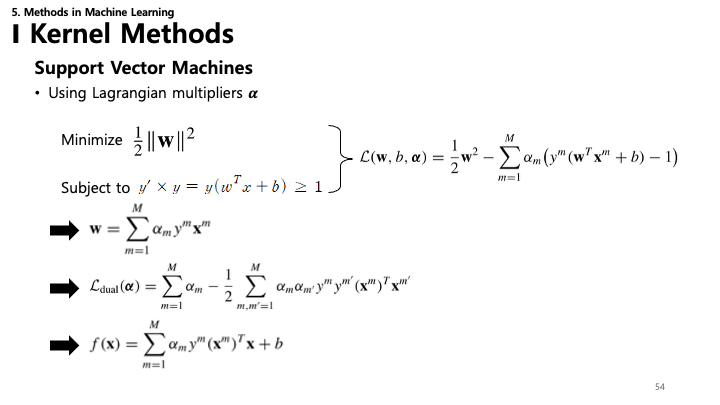
- 라그랑주 승수($\alpha$)를 사용하여 제약 조건이 있는 최적화 문제를 풉니다.
- $\mathcal{L}(\mathbf{w}, b, \mathbf{\alpha}) = \frac{1}{2}||\mathbf{w}||^2 - \sum_{m=1}^M \alpha_m (y^m (\mathbf{w}^T \mathbf{x}^m + b) - 1)$
- 쌍대 공식 (Dual Formulation):
- $\mathcal{L}_{\text{dual}}(\mathbf{\alpha}) = \sum \alpha_m - \frac{1}{2} \sum \alpha_m \alpha_{m'} y^m y^{m'} (\mathbf{x}^m)^T \mathbf{x}^{m'}$
- 결정 함수: $f(\mathbf{x}) = \sum \alpha_m y^m (\mathbf{x}^m)^T \mathbf{x} + b$
- 해(solution)가 오직 내적 $(\mathbf{x}^m)^T \mathbf{x}$에만 의존한다는 점에 주목하세요. 이는 커널 트릭을 가능하게 합니다.
55. 커널 방법의 한계
커널 방법은 강력하지만 실제 적용에 있어 몇 가지 중요한 한계가 있습니다:
- 계산 비용 (Computational Cost): 커널 행렬 $K$의 크기는 훈련 데이터 수 $M$에 대해 $M \times M$입니다. $M$이 클 경우 행렬을 저장하고 계산하는 비용이 $\mathcal{O}(M^2)$~$\mathcal{O}(M^3)$으로 급격히 증가합니다. 수백만 개의 데이터가 있다면 사실상 사용 불가능합니다.
- 커널 선택 문제 (Kernel Selection): 어떤 커널 함수가 주어진 데이터에 가장 적합한지 사전에 알기 어렵습니다. 잘못된 커널을 선택하면 성능이 크게 저하됩니다.
- 차원의 저주 (Curse of Dimensionality): 데이터 차원이 매우 높을 경우, 매핑된 특징 공간에서 “거리” 개념이 의미를 잃을 수 있습니다.
- 특징 공간의 해석 불가: 암묵적으로 매핑된 고차원 특징 공간은 인간이 직접 해석하기 어렵습니다.
양자 컴퓨팅과의 연결: 바로 이 계산 비용 문제가 양자 커널 방법(3장에서 다루는 QSVM 등)이 잠재적 이점을 가질 수 있는 이유입니다. 양자 컴퓨터는 고전적으로 계산하기 어려운 커널 함수를 효율적으로 추정할 수 있습니다.
56. 커널 트릭 요약
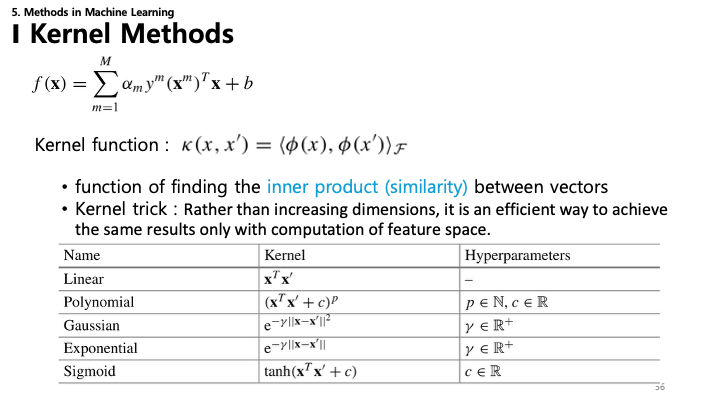
- 표현 정리 형태: $f(\mathbf{x}) = \sum \alpha_m y^m \kappa(\mathbf{x}^m, \mathbf{x}) + b$
- 커널 트릭: 실제로 특징 벡터를 계산하지 않고도 고차원 매핑의 결과를 얻는 계산 효율적인 방법.
- 커널 표 재등장: Linear, Polynomial, Gaussian, Exponential, Sigmoid.
57. 가우시안 프로세스 (GP)
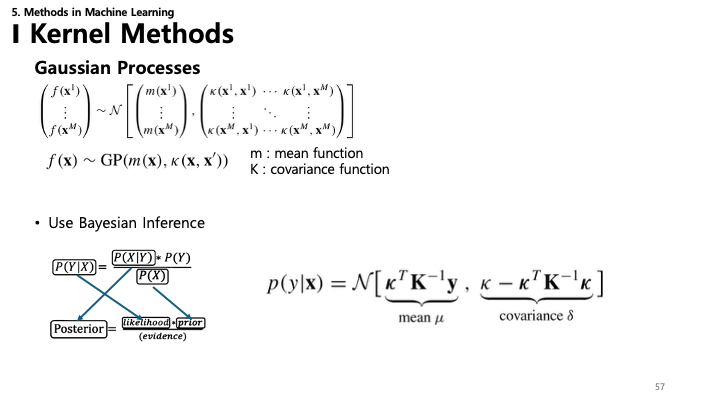
- 가우시안 프로세스: 유한한 변수 집합이 결합 정규 분포를 따른다고 가정하는 비모수적 모델.
- $f(\mathbf{x}) \sim GP(m(\mathbf{x}), \kappa(\mathbf{x}, \mathbf{x}'))$
- 평균 함수 $m$과 공분산 함수(커널) $\kappa$로 정의됩니다.
- 추론: 새로운 데이터가 주어졌을 때 베이지안 추론을 사용하여 사후 분포 $p(y|\mathbf{x})$를 업데이트합니다.
- 결과는 업데이트된 평균과 공분산을 가진 가우시안 분포입니다.
58. 가우시안 프로세스: 시각화
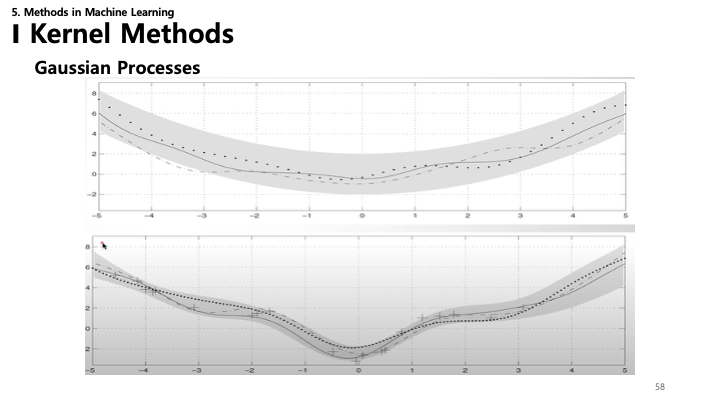
- GP 회귀를 시각화했습니다.
- 점선: 예측된 평균.
- 음영 영역: 신뢰 구간(불확실성). 데이터 포인트 근처에서는 좁아지고 데이터가 없는 곳에서는 넓어집니다.
- 불확실성을 정량화할 수 있다는 점이 가우시안 프로세스의 핵심 장점입니다.